Hier einmal die 4. Üpung
tut4.pdf (125 KB)
Wir haben beim 2. Bsp den Winkel \pi bekommen, kann man aber auch ohne Rechnung sehen (?).
Mit Dichtmatrix ist das eher mühsam, hat das wer schön/schnell?
Also das wären mal meine Vorschläge für die Übungsbeispiele dieser Woche. Beispiel 3b habe ich aber nur so hin getrimmt dass das richtige Ergebnis heraus kommt. Weil eigentlich sollte man ja eine beliebige Richtung zeigen. Hat da jemand einen Tipp für mich?
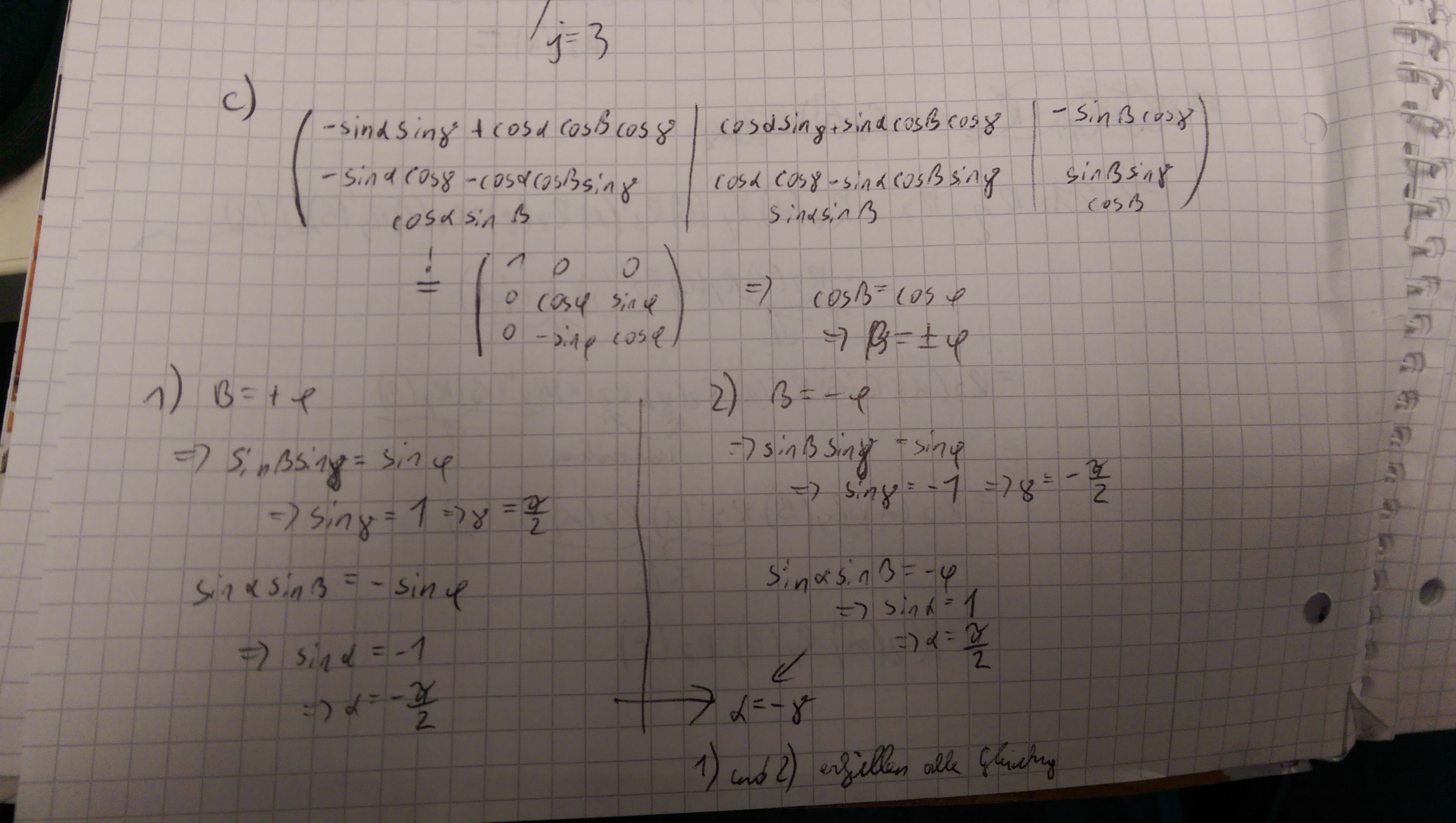
Beispiel 1c ist jetzt mal nicht bei der Lösung dabei weil die Matrix nicht stimmt. Das hätte ich so versucht wie bei der 2. Übung das Bsp. 2a. Dabei sind die sin jedoch alle mit einem Vorfaktor -i/sqrt2 und die cos an der Position -11 und 1-1 sind ½(cos-1) anstatt ½(1-cos). Der Rest würde schon stimmen. Kann mir da jemand weiter helfen
DOC.pdf (1.15 MB)
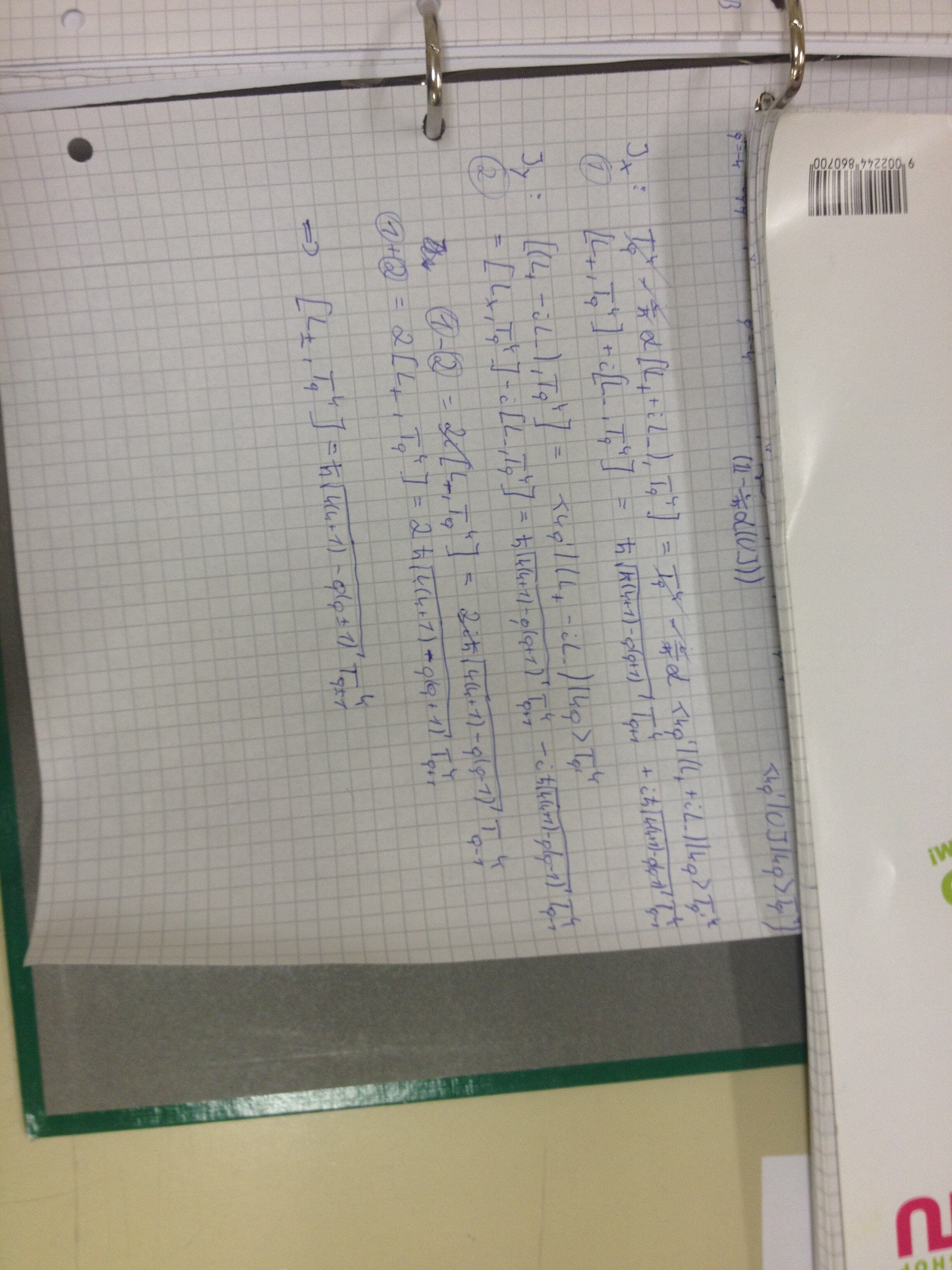
Also ich hätte 3b) so verstanden, dass man bei der infinitesimalen Drehung J+ bzw. J- im Rotationsoperator verwendet (und nicht beliebige Drehungen).
Das mit den beliebigen Winkeln/Drehungen, bezieht sich ja auf die Definition der sphärischen Tensoren.
Also ich hab die Rechnung analog zu der durchgeführt, die Rotter in der Vorlesung für Jz gezeigt hat und komme damit genau auf die gewünschte Identität.
Na dann stimmt das 3b) so wie ich es gemacht habe.
Das Bsp 1c) hätte ich auch so gemacht wie in der VO aber da stimmen eben ein paar Vorfaktoren nicht. Könntest du viellicht so nett sein und deine Variante hochladen?
Hier mein 1c,
ich habe die passiven Drehungen von zyz mit einer passiven Drehung von x gleichgesetzt und dann die Einträge verglichen.

Danek das Hilft mir sehr weiter. Ich komme auf das gleiche wie du
das Vorzeichen stimmt nur dann wenn die Matrix im Skriptum mit v_{1}\ bei \ m = -1, \ v_{2} \ bei \ m = 0, \ v_{3} \ bei \ m = 1 so aufgestellt wurde. Ich habe aber gerade in den Folien gesehen, dass der erste Vektor mit m=1 gebildet wurde, daher gehören bei allen sin ein Minus
Muss man bei Bsp. 2 die Dichtematritzen normieren?
hey meehh, wenn ich das richtig sehe verwendest du im 2. bsp die drehmatrix um die y-achse, hat das einen bestimmten grund? wenn man es mit der x-drehmatrix rechnet bekommt man nämlich andere vorzeichen bei den einzelnen elementen.
lg
@D7000 Ich hab nach dem S System Normiert weil ich dahinter die Teilchenzahl kenne.
@moonboots es gehört natürlich eine Drehung um die x-Achse aber zu der Zeit war die noch falsch und deswegen sind die Vorzeichen auch nicht richtig.
Wie kommt man bei beispiel 2 auf die Winkel für Minimum und Maximum?
@pfadfinder: entweder anhand der skizze überlegen überlegen das das zweite magnetfeld genau umgekehrt wie das erste gerichtet sein muss also (Pi) weil wenn du beim ersten nur ups durchlässt und beim zweiten downs rausfilterst ist danach alles weg. oder du kannst den term der bei der rechnung mit der wellenfunktion rauskommt verkürzen in dem du sagst beta1+beta2=Pi/2 dann kommt mir am schluss ein term raus der so aussieht: i/Sqrt(2)(1/2cos(beta)+1/2cos^2(beta)+sin^2(beta)) da sieht man das das minimal wird wenn cos(beta) am minimum ist also pi.
hoffe das hilft.
hat wer nen etwas plausiblere rechnung für 3b) ? ^^
mag irgendwie nicht wie aus ner beliebigen Drehrichtung aufeinmal J± wird
da J_{\pm}=J_x\pm i J_y erhältst du aus dem ergebnis für die einzelnen drehrichtungen x,y,z das ergebnis für auf- und absteiger
ich komme übrigens am ende auf ein sehr kompaktes ergebnis für die wahrscheinlichkeit im bsp 2 P(\phi)=\frac{1+\cos(\phi)}{3-\sin(\phi)}. kann das jemand bestätigen?
kannst du vielleicht dein 3b online stellen. bei 2 kommt mir was nicht so kompaktes raus…
Hier noch die Ergänzung zu 3b)
@meehh: wie argumentierst du bei bsp 2 deine rechnung über die zustände/dichtematrizen? dir kommt ja eigentlich nie eine intensität raus.